Brushless Motors can be wired to spin in clockwise or counterclockwise, and the software to control them can automatically change directions. Motors on Gimbals can also be mounted in many different ways, so the software needs to detect which way is the proper rotation for your setup. This is when you may need to use the Invert option under Motor Configuration.
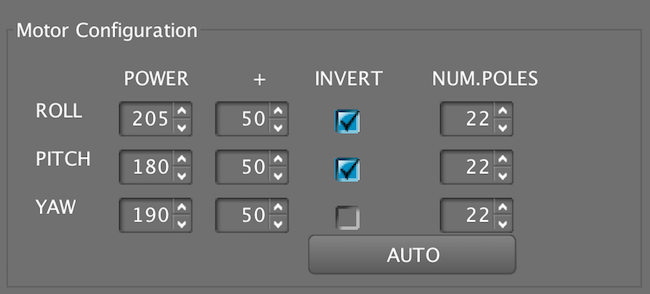
IMAGE IS AN EXAMPLE. DO NOT COPY THESE INVERT OPTIONS DIRECTLY. FOLLOW INSTRUCTIONS BELOW.
Before starting this process make sure you have the Sensor Orientation setup correctly. This information is required when checking Motor direction. If you are unsure about your Sensor positions, check this article.
Once you have your sensors setup correctly, follow the instructions in the video below to determine if any of your Motors require the Invert option selected for your Gimbal.
We understand that many people want to Tune their Gimbals for different characteristics. But instead of downloading and sharing profiles, Keep in mind that Profiles carry several settings that are unique to your system. Instead of downloading and installing complete Profiles just for PID settings, we suggest just changing your PID settings manually through the software. This way you don't affect other settings such as Motor Invert Options, RC Settings, Sensor Positions, Follow Modes, etc.